VVT - Control de leva variable
Algunos motores incorporan un sistema de variación del avance/retraso del árbol de levas, que se activa según los requisitos de rendimiento del motor. Las denominaciones comerciales varían (VVT, VTC, VANOS, CVTC, AVCS, etc.), pero lo relevante es cómo se controla el ángulo de las válvulas de admisión y/o escape.
- VVT de dos posiciones (on/off, step): el árbol de levas conmuta entre dos ángulos fijos (p. ej., avance y retardo). El solenoide solo abre o cierra; no hay posiciones intermedias.
- VVT proporcional en lazo abierto: el ángulo varía de forma continua mediante una señal PWM, sin realimentación de posición.
- VVT proporcional en lazo cerrado: la ECU comanda una válvula con PWM y compara el ángulo objetivo con el medido por el sensor de posición del árbol de levas. El control en lazo cerrado se implementa con PID y requiere medir el ángulo del árbol de levas.
La RacerPRO puede controlar los actuadores de VVT (Variable Valve Timing) en las tres modalidades anteriores, con hasta dos curvas (una para admisión y otra para escape), y hasta dos actuadores para admisión y dos actuadores para la configuración de escape. Si además estos cuatro actuadores trabajan en lazo cerrado, la RacerPRO puede leer hasta 4 captores de fase independientes, uno por cada actuador, para controlar de forma eficiente el avance requerido
A continuación, se muestra la pantalla de Levas variables con una configuración de ejemplo, en lazo cerrado, y un solo actuador/sensor de fase.
Como podemos ver, la pantalla cuenta con dos pestañas, casi idénticas. Una es para el ajuste de la o las levas de admisión, mientras que la segunda pestaña es para el control de las levas de escape.
Habilitación
Para habilitar el control de la VVT, seleccione la salida de la ECU a la que está conectado el actuador. Si se va a trabajar en lazo cerrado, conecte además el captor de fase e indique en qué entrada de la RacerPRO está instalado.
En la animación se observa que, al habilitar la VVT 1 en la salida GC3, se habilitan la selección del captor de fase y la configuración de una segunda VVT (VVT 2). Asimismo, al asignar una entrada al captor de fase, queda disponible el modo de control en lazo cerrado; sin un captor asociado, esta opción no está disponible.
Modo de Trabajo
En esta sección vamos a definir cómo se controla el VVT
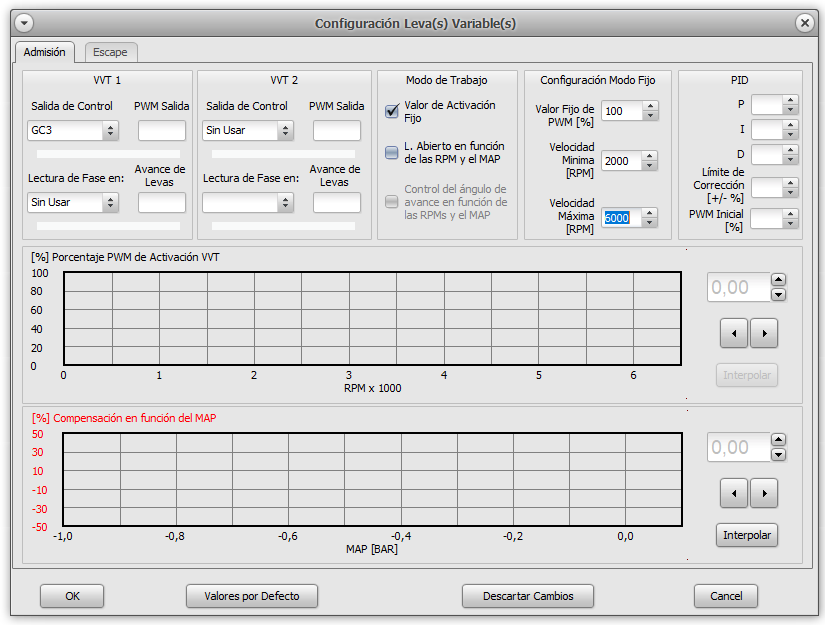
Valor de Activación Fijo.
Se Aplica una señal constante cuando se cumplen ciertas condiciones. Este es el modo que vamos a elegir para la VVT de dos posiciones.
Como podemos ver, las curvas no están disponibles, pero tenemos a disposición los ajustes de Configuración en Modo Fijo, en el cual debemos seleccionar:
- Valor Fijo de PWM: El único valor de PWM que se aplicará cuando se active la VVT. Para el caso de la VVT de dos posiciones, el valor de PWM deberá ser 100%.
- Los rangos de trabajo serán configurados entre la Velocidad Minima y la Velocidad Máxima
Lazo Abierto según RPM y MAP
En esta estrategia, la válvula se abre a un valor de PWM determinado según las demandas del motor. Se dispone de curvas de ajuste que permiten configurar el PWM aplicado en la salida seleccionada en función de las RPM del motor y su carga, como se observa en la siguiente animación:
En la sección VVT 1, se muestra el valor actual del PWM aplicado, tanto de forma numérica como mediante un vúmetro lineal:
Para habilitar este modo, primero seleccione la salida correspondiente en la sección VVT 1. Luego, active la casilla L. Abierto en función de las RPM y el MAP. Esto habilitará las curvas de PWM en función de RPM y MAP, permitiendo ajustarlas según los requerimientos específicos.
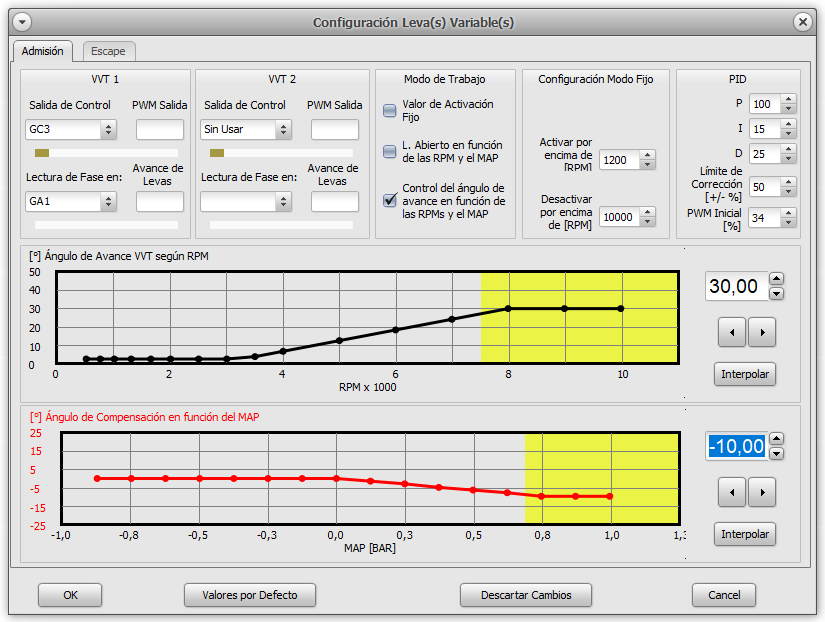
Control del Ángulo de Avance según RPM y MAP
Este es el modo más avanzado para el control de la leva variable (VVT). En este caso, la PRO200 ajusta la intensidad de la señal PWM aplicada al actuador para alcanzar el ángulo de avance deseado. Para medir dicho ángulo, es necesario conectar el sensor de fase del árbol de levas correspondiente e indicarlo en la sección VVT 1, justo debajo de la selección de la salida del actuador.
Solo al seleccionar el sensor de fase será posible habilitar el modo de lazo cerrado. Para ello, marque la casilla Control del ángulo de avance en función de las RPM y el MAP, como se muestra en la siguiente animación:
Lectura de Fase.
Por cada actuador que controla el ángulo de avance, se necesita un captor de fase capaz de medir el avance del árbol de levas en cuestión. Estos se pueden conectar en cualquiera de las entradas GA1-GA4 de la PRO200/300.
Una vez seleccionadas la o las entradas que se usarán para leer el ángulo de fase del árbol de levas, la entrada deberá ser configurada como Sensor de Fase en la sección Entradas Generales.
Cabe destacar que las PRO200/300 toman la señal del sensor de árbol de levas y aprende de forma automática la "forma" del mismo, por lo que no es necesario configurar como debería ser la señal. Para corroborar que es lo que la ECU detecta, una vez configurada la entrada y con el motor en marcha, podemos ir a diagnóstico y seleccionar la entrada de fase en cuestión para ver la forma de los dientes del árbol de levas. En Diagnóstico, mas abajo te mostramos como.
Límites de Trabajo.
Si bien podemos configurar el ángulo de avance del árbol de levas en todo el rango de trabajo del motor, aún tenemos disponibles los límites mínimo y máximo de RPM, los cuales desactivan por completo la función de control del lazo cerrado en caso el motor supere los límites establecidos.
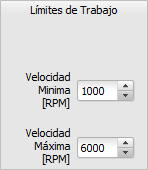
En este ejemplo, el control del lazo cerrado se desactiva por completo si el motor está por debajo de las 100 RPM o por encima de las 6000 RPM.
Lazo de Control.
El control en lazo cerrado utiliza un algoritmo PID (Proporcional, Integral, Derivativo) para ajustar con precisión el ángulo del árbol de levas. Este algoritmo compara continuamente el ángulo objetivo configurado con el ángulo real medido por el sensor de fase, realizando los ajustes necesarios para minimizar el error.
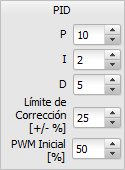
- Componente Proporcional (P): Ajusta el error en función de la diferencia instantánea entre el ángulo objetivo y el ángulo medido, proporcionando una corrección inmediata.
- Componente Integral (I): Acumula el error a lo largo del tiempo para corregir desviaciones persistentes, asegurando que el sistema alcance el objetivo deseado.
- Componente Derivativo (D): Responde a la velocidad de cambio del error, ayudando a estabilizar el sistema y prevenir oscilaciones.
- Límite de Corrección [%]: Permite restringir la fuerza máxima aplicada al actuador. Si no se desea limitar, este valor debe configurarse en 100%.
- PWM Inicial [%]: Define el porcentaje mínimo de PWM necesario para que el sistema comience a generar avance. Este valor debe ajustarse según las características del actuador.
Un ajuste adecuado de los parámetros PID es esencial para garantizar un control estable y eficiente del sistema VVT, evitando tanto sobrecorrecciones como tiempos de respuesta excesivos. Los parámetros por defecto de la aplicación son un buen punto de partida.
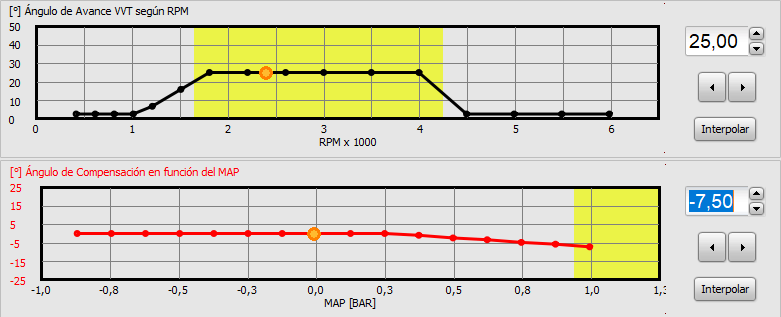
Ángulo de avance objetivo.
Finalmente, las curvas del ángulo de avance objetivo deberán ser ajustadas según los requerimientos del preparador, de igual forma que ajustamos las curvas de encendido, fijando primero el ángulo en función de las RPM y luego compensando según la curva del motor.
Diagnóstico.
Aunque no utilicemos el control en lazo cerrado, es posible conectar un sensor de fase para medir el avance del árbol de levas, si se cuenta con esta opción. Esto permite verificar el correcto funcionamiento del sensor y observar la forma y cantidad de dientes del árbol de levas. Para realizar esta comprobación, con el motor en marcha, acceda a la ventana de diagnóstico. En el lado derecho, seleccione la entrada de fase que desea analizar para confirmar si la señal se detecta correctamente.
En la siguiente imagen, se observa un ejemplo donde el sensor no está conectado o no se detecta señal alguna. Esto se evidencia porque el valor de Levas aparece en cero:
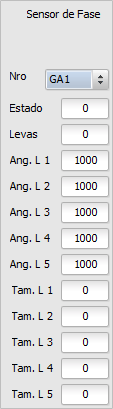
Por el contrario, cuando el sensor está correctamente conectado y la PRO200/300 detecta la señal de manera adecuada, el diagnóstico mostrará algo similar a lo siguiente:
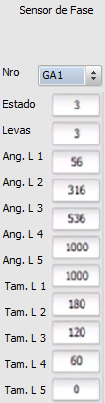
En este caso particular, la señal detectada tiene una forma compuesta por tres levas, con tamaños de 180, 120 y 60 grados, respectivamente. Las posiciones angulares de estas levas varían según el ángulo de avance aplicado.
Otra herramienta fundamental para controlar el correcto funcionamiento del actuador de la VVT es utilizar el Datalogger. En la siguiente imagen, podemos ver la curva objetivo, la real, y el PWM aplicado para obtener el ángulo de avance requerido. Este ejemplo muestra el resultado de un ajuste logrado de todos los parámetros.
